

4.8 单片机 LED 流水灯程序[详细]
我们前边学了点亮一个 LED 小灯,然后又学了 LED 小灯闪烁,现在我们要进一步学习如何让8个小灯依次一个接一个的点亮,流动起来,也就是常说的流水灯。先来看8个 LED 的核心电路图,如图4-12。
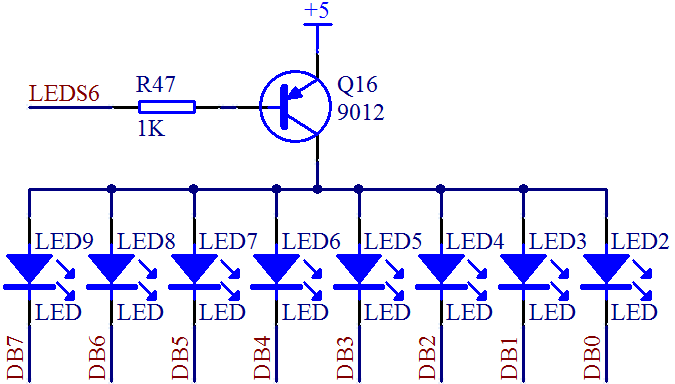
图4-12 LED 小灯电路图
通过前面的课程,我们可以了解到控制引脚 P0.0 经过 74HC245 控制了 DB0,P0.1 控制 DB1...... P0.7 控制 DB7。我们还学到一个字节是8位,我们如果写一个 P0,就代表了 P0.0 到 P0.7 的全部8个位。比如我们写 P0 = 0xFE;转换成二进制就是 0b11111110,所以点亮 LED 小灯的程序,实际上我们可以改成另外一种写法,如下所示。
#include <reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
void main(){
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
P0 = 0xFE; //向 P0 写入数据来控制 LED 小灯
while (1); //程序停止在这里
}通过上边这个程序我们可以看出来,可以通过 P0 来控制所有的8个 LED 小灯的亮和灭。我们下边要进行依次亮和灭,怎么办呢?从这里就可以得到方法了,如果想让单片机流水灯流动起来,依次要赋给 P0 的数值就是:0xFE、0xFD、0xFB、0xF7、0xEF、0xDF、0xBF、0x7F。
在我们的 C 语言当中,有一个移位操作,其中<<代表的是左移,>>代表的是右移。比如 a = 0x01<<1;就是 a 的结果等于 0x01 左移一位。大家注意,移位都是指二进制移位,那么移位完了,本来在第0位的1移动到了第一位上,移动完了低位是补0的。所以 a 的值最终是等于 0x02。
还要学习另外一个运算符~,这个符号是按位取反的意思,同理按位取反也是针对二进制而言。比如 a = ~(0x01); 0x01 的二进制是 0b00000001,按位取反后就是 0b11111110,那么 a 的值就是0xFE 了。
学会了这两个符号后,我们就可以把流水灯的程序写出来,先把程序贴上。
#include <reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
void main(){
unsigned int i = 0; //定义循环变量 i,用于软件延时
unsigned char cnt = 0; //定义计数变量 cnt,用于移位控制
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
while (1){ //主循环,程序无限循环执行该循环体语句
P0 = ~(0x01 << cnt); //P0 等于1左移 cnt 位,控制8个 LED
for (i=0; i<20000; i++); //软件延时
cnt++; //移位计数变量自加1
if (cnt >= 8){ //移位计数超过7后,再重新从0开始
cnt = 0;
}
}
}程序中 cnt 是 count 的缩写,计数的意思,是非常常用的一个变量名称。当 cnt 等于0的时候,1左移0位还是1,那么写成二进制后就是 0b00000001,对这个数字按位取反就是 0b11111110,亮的是最右边的小灯。当 cnt 等于7的时候,1左移7位就是 0b10000000,按位取反后是 0b01111111,亮的是最左边的小灯。中间过程大家可以自己分析一下了。
流水灯结束后,关于小灯的讲解,就暂时告一段落了,后边还有小灯的高级用法,我们到时候再详细讲解。
