

17.5 A/D 差分输入信号
在上一节已经提到过,控制字的第4位和第5位是用于控制 PCF8591 的模拟输入引脚是单端输入还是差分输入。差分输入是模拟电路常用的一个技巧,这里我们把相关知识做一些简单介绍。
从严格意义上来讲,其实所有的信号都是差分信号,因为所有的电压只能是相对于另外一个电压而言。但是大多数系统,我们都是把系统的 GND 作为基准点。而对于 A/D 来说的差分输入,通常情况下是除了 GND 以外,另外两路幅度相同,极性相反的输入信号,其实理解起来很简单,就如同跷跷板一样。如图17-8所示。
图17-8 差分输入原理
差分输入的话,就不是单个输入,而是由2个输入端构成的一组输入。PCF8591 一共是4个模拟输入端,可以配置成4种模式,最典型的是4个输入端构造成的两路差分模式,如图17-9所示。
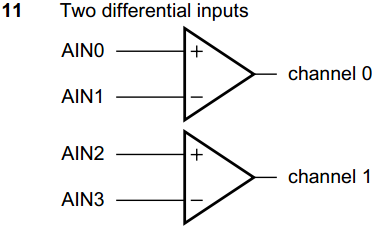
图17-9 PCF8591 差分输入模式
当控制字的第4位和第5位都是1的时候,那么4路模拟被配置成2路差分模式输入 channel 0 和 channel 1。我们以 channel 0 为例,其中 AIN0 是正向输入端,AIN1 是反向输入端,它们之间的信号输入是幅度相同,极性相反的信号,通过减法器后,得到的是两个输入通道的差值,如图17-10所示。
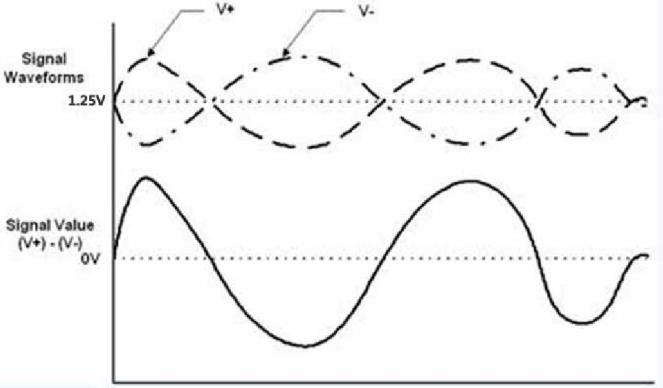
图17-10 差分输入信号
通常情况下,差分输入的中线是基准电压的一半,我们的基准电压是 2.5 V,假如 1.25 V 作为中线,V+ 是 AIN0 的输入波形,V- 是 AIN1 的输入波形,Signal Value 就是经过减法器后的波形。很多 A/D 都采用差分的方式输入,因为差分输入方式比单端输入来说,有更强的抗干扰能力。
单端输入信号时,如果一线上发生干扰变化,比如幅度增大 5 mv,GND 不变,测到的数据会有偏差;而差分信号输入时,当外界存在干扰信号时,只要布线合理,大都同时被耦合到两条线上,幅度增大 5 mv 会同时增大 5 mv,而接收端关心的只是两个信号的差值,所以外界的这种共模噪声可以被完全抵消掉。由于两根信号的极性相反,它们对外辐射的电磁场可以相互抵消,有效的抑制释放到外界的电磁能量。
在我们的 KST-51 开发板上,我们没有做差分信号输入的实验环境,由于这个内容在 A/D 部分比较重要,所以还是介绍给大家,以供参考。
