

16.3 NEC 协议红外遥控器
家电遥控器通信距离往往要求不高,而红外的成本比其它无线设备要低的多,所以家电遥控器应用中红外始终占据着一席之地。遥控器的基带通信协议很多,大概有几十种,常用的就有 ITT 协议、NEC 协议、Sharp 协议、Philips RC-5 协议、Sony SIRC 协议等。用的最多的就是 NEC 协议了,因此我们 KST-51 开发板配套的遥控器直接采用 NEC 协议,我们这节课也以 NEC 协议标准来讲解一下。
NEC 协议的数据格式包括了引导码、用户码、用户码(或者用户码反码)、按键键码和键码反码,最后一个停止位。停止位主要起隔离作用,一般不进行判断,编程时我们也不予理会。其中数据编码总共是4个字节32位,如图16-7所示。第一个字节是用户码,第二个字节可能也是用户码,或者是用户码的反码,具体由生产商决定,第三个字节就是当前按键的键数据码,而第四个字节是键数据码的反码,可用于对数据的纠错。

图16-7 NEC 协议数据格式
这个 NEC 协议,表示数据的方式不像我们之前学过的比如 UART 那样直观,而是每一位数据本身也需要进行编码,编码后再进行载波调制。
- 引导码:9 ms 的载波 +4.5 ms 的空闲。
- 比特值“0”:560 us 的载波 +560 us 的空闲。
- 比特值“1”:560 us 的载波 +1.68 ms 的空闲。
结合图16-7我们就能看明白了,最前面黑乎乎的一段,是引导码的 9 ms 载波,紧接着是引导码的 4.5 ms 的空闲,而后边的数据码,是众多载波和空闲交叉,它们的长短就由其要传递的具体数据来决定。HS0038B 这个红外一体化接收头,当收到有载波的信号的时候,会输出一个低电平,空闲的时候会输出高电平,我们用逻辑分析仪抓出来一个红外按键通过HS0038B 解码后的图形来了解一下,如图16-8所示。
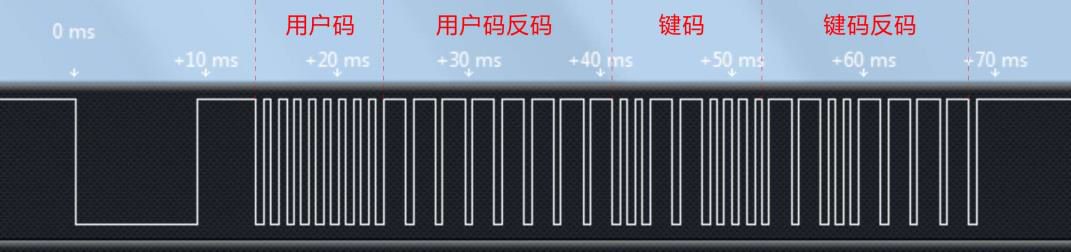
图16-8 红外遥控器按键编码
从图上可以看出,先是 9 ms 载波加 4.5 ms 空闲的起始码,数据码是低位在前,高位在后,数据码第一个字节是8组 560 us 的载波加 560 us 的空闲,也就是 0x00,第二个字节是8组 560 us的载波加 1.68 ms 的空闲,可以看出来是 0xFF,这两个字节就是用户码和用户码的反码。按键的键码二进制是 0x0C,反码就是 0xF3,最后跟了一个 560 us 载波停止位。对于我们的遥控器来说,不同的按键,就是键码和键码反码的区分,用户码是一样的。这样我们就可以通过单片机的程序,把当前的按键的键码给解析出来。
我们前边学习中断的时候,学到51单片机有外部中断0和外部中断1这两个外部中断。我们的红外接收引脚接到了 P3.3 引脚上,这个引脚的第二功能就是外部中断1。在寄存器TCON 中的 bit3 和 bit2 这两位,是和外部中断1相关的两位。其中 IE1 是外部中断标志位,当外部中断发生后,这一位被自动置1,和定时器中断标志位 TF 相似,进入中断后会自动清零,也可以软件清零。bit2 是设置外部中断类型的,如果 bit2 为0,那么只要 P3.3 为低电平就可以触发中断,如果 bit2 为1,那么 P3.3 从高电平到低电平的下降沿发生才可以触发中断。此外,外部中断1使能位是 EX1。那下面我们就把程序写出来,使用数码管把遥控器的用户码和键码显示出来。
Infrared.c 文件主要是用来检测红外通信的,当发生外部中断后,进入外部中断,通过定时器1定时,首先对引导码判断,而后对数据码的每个位逐位获取高低电平的时间,从而得知每一位是0还是1,最终把数据码解出来。虽然最终实现的功能很简单,但因为编码本身的复杂性,使得红外接收的中断程序在逻辑上显得就比较复杂,那么我们首先提供出中断函数的程序流程图,大家可以对照流程图来理解程序代码,如图16-9所示。
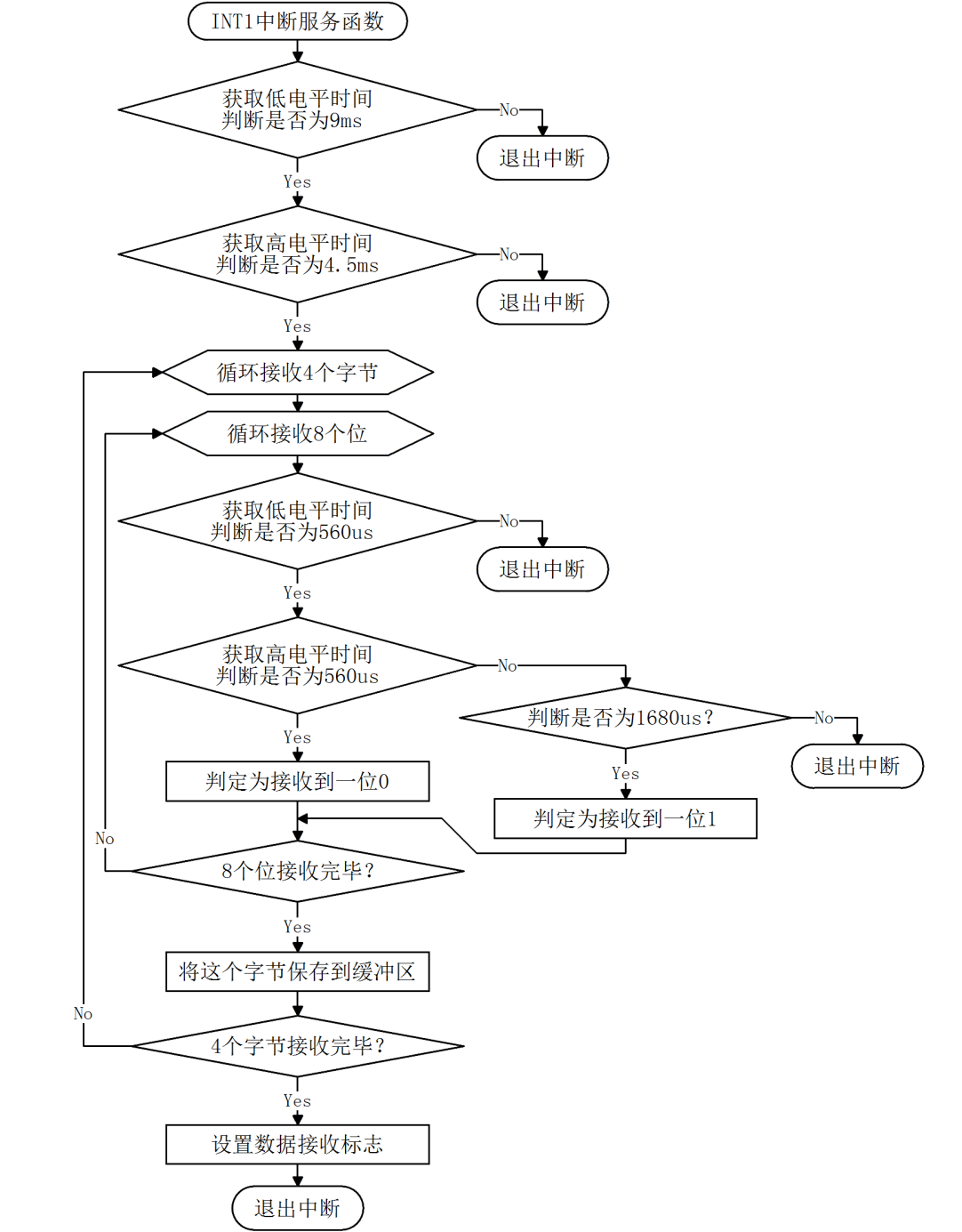
图16-9 红外接收程序流程图
/***************************Infrared.c 文件程序源代码*****************************/
#include <reg52.h>
sbit IR_INPUT = P3^3; //红外接收引脚
bit irflag = 0; //红外接收标志,收到一帧正确数据后置 1
unsigned char ircode[4]; //红外代码接收缓冲区
/* 初始化红外接收功能 */
void InitInfrared(){
IR_INPUT = 1; //确保红外接收引脚被释放
TMOD &= 0x0F; //清零 T1 的控制位
TMOD |= 0x10; //配置 T1 为模式 1
TR1 = 0; //停止 T1 计数
ET1 = 0; //禁止 T1 中断
IT1 = 1; //设置 INT1 为负边沿触发
EX1 = 1; //使能 INT1 中断
}
/* 获取当前高电平的持续时间 */
unsigned int GetHighTime(){
TH1 = 0; //清零 T1 计数初值
TL1 = 0;
TR1 = 1; //启动 T1 计数
while (IR_INPUT){ //红外输入引脚为 1 时循环检测等待,变为 0 时则结束本循环
//当 T1 计数值大于 0x4000,即高电平持续时间超过约 18ms 时,
//强制退出循环,是为了避免信号异常时,程序假死在这里。
if (TH1 >= 0x40){
break;
}
}
TR1 = 0; //停止 T1 计数
return (TH1*256 + TL1); //T1 计数值合成为 16bit 整型数,并返回该数
}
/* 获取当前低电平的持续时间 */
unsigned int GetLowTime(){
TH1 = 0; //清零 T1 计数初值
TL1 = 0;
TR1 = 1; //启动 T1 计数
while (!IR_INPUT){ //红外输入引脚为 0 时循环检测等待,变为 1 时则结束本循环
//当 T1 计数值大于 0x4000,即低电平持续时间超过约 18ms 时,
//强制退出循环,是为了避免信号异常时,程序假死在这里。
if (TH1 >= 0x40){
break;
}
}
TR1 = 0; //停止 T1 计数
return (TH1*256 + TL1); //T1 计数值合成为 16bit 整型数,并返回该数
}
/* INT1 中断服务函数,执行红外接收及解码 */
void EXINT1_ISR() interrupt 2{
unsigned char i, j;
unsigned char byt;
unsigned int time;
//接收并判定引导码的 9ms 低电平
time = GetLowTime();
//时间判定范围为 8.5~9.5ms,
//超过此范围则说明为误码,直接退出
if ((time<7833) || (time>8755)){
IE1 = 0; //退出前清零 INT1 中断标志
return;
}
//接收并判定引导码的 4.5ms 高电平
time = GetHighTime();
//时间判定范围为 4.0~5.0ms,
//超过此范围则说明为误码,直接退出
if ((time<3686) || (time>4608)){
IE1 = 0;
return;
}
//接收并判定后续的 4 字节数据
for (i=0; i<4; i++){ //循环接收 4 个字节
for (j=0; j<8; j++){ //循环接收判定每字节的 8 个 bit
//接收判定每 bit 的 560us 低电平
time = GetLowTime();
//时间判定范围为 340~780us,
//超过此范围则说明为误码,直接退出
if ((time<313) || (time>718)){
IE1 = 0;
return;
}
//接收每 bit 高电平时间,判定该 bit 的值
time = GetHighTime();
//时间判定范围为 340~780us,
//在此范围内说明该 bit 值为 0
if ((time>313) && (time<718)){
byt >>= 1; //因低位在先,所以数据右移,高位为 0
//时间判定范围为 1460~1900us,
//在此范围内说明该 bit 值为 1
}else if ((time>1345) && (time<1751)){
byt >>= 1; //因低位在先,所以数据右移,
byt |= 0x80; //高位置 1
}else{ //不在上述范围内则说明为误码,直接退出
IE1 = 0;
return;
}
}
ircode[i] = byt; //接收完一个字节后保存到缓冲区
}
irflag = 1; //接收完毕后设置标志
IE1 = 0; //退出前清零 INT1 中断标志
}大家在阅读这个程序时,会发现我们在获取高低电平时间的时候做了超时判断 if(TH1 >= 0x40),这个超时判断主要是为了应对输入信号异常(比如意外的干扰等)情况的,如果不做超时判断,当输入信号异常时,程序就有可能会一直等待一个无法到来的跳变沿,而造成程序假死。
另外补充一点,遥控器的单按按键和持续按住按键发出来的信号是不同的。我们先来对比一下两种按键方式的实测信号波形,如图16-10和16-11所示。

图16-10 红外单次按键时序图

图16-11 红外持续按键时序图
单次按键的结果16-9和我们之前的图16-8是一样的,这个不需要再解释。而持续按键,首先会发出一个和单次按键一样的波形出来,经过大概 40 ms 后,会产生一个 9 ms 载波加 2.25 ms 空闲,再跟一个停止位的波形,这个叫做重复码,而后只要你还在按住按键,那么每隔约 108 ms 就会产生一个重复码。对于这个重复码我们的程序并没有对它单独解析,而是直接忽略掉了,这并不影响对正常按键数据的接收。如果你日后做程序时需要用到这个重复码,那么只需要再把对重复码的解析添加进来就可以了。
/*****************************main.c 文件程序源代码******************************/
#include <reg52.h>
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned char code LedChar[] = { //数码管显示字符转换表
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
unsigned char LedBuff[6] = { //数码管显示缓冲区
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF
};
unsigned char T0RH = 0; //T0 重载值的高字节
unsigned char T0RL = 0; //T0 重载值的低字节
extern bit irflag;
extern unsigned char ircode[4];
extern void InitInfrared();
void ConfigTimer0(unsigned int ms);
void main(){
EA = 1; //开总中断
ENLED = 0; //使能选择数码管
ADDR3 = 1;
InitInfrared(); //初始化红外功能
ConfigTimer0(1); //配置 T0 定时 1ms
//PT0 = 1; //配置 T0 中断为高优先级,启用本行可消除接收时的闪烁
while (1){
if (irflag){ //接收到红外数据时刷新显示
irflag = 0;
LedBuff[5] = LedChar[ircode[0] >> 4]; //用户码显示
LedBuff[4] = LedChar[ircode[0]&0x0F];
LedBuff[1] = LedChar[ircode[2] >> 4]; //键码显示
LedBuff[0] = LedChar[ircode[2]&0x0F];
}
}
}
/* 配置并启动 T0,ms-T0 定时时间 */
void ConfigTimer0(unsigned int ms){
unsigned long tmp; //临时变量
tmp = 11059200 / 12; //定时器计数频率
tmp = (tmp * ms) / 1000; //计算所需的计数值
tmp = 65536 - tmp; //计算定时器重载值
tmp = tmp + 13; //补偿中断响应延时造成的误差
T0RH = (unsigned char)(tmp>>8); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零 T0 的控制位
TMOD |= 0x01; //配置 T0 为模式 1
TH0 = T0RH; //加载 T0 重载值
TL0 = T0RL;
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
}
/* LED 动态扫描刷新函数,需在定时中断中调用 */
void LedScan(){
static unsigned char i = 0; //动态扫描索引
P0 = 0xFF; //关闭所有段选位,显示消隐
P1 = (P1 & 0xF8) | i; //位选索引值赋值到 P1 口低 3 位
P0 = LedBuff[i]; //缓冲区中索引位置的数据送到 P0 口
if (i < sizeof(LedBuff)-1){ //索引递增循环,遍历整个缓冲区
i++;
}else{
i = 0;
}
}
/* T0 中断服务函数,执行数码管扫描显示 */
void InterruptTimer0() interrupt 1{
TH0 = T0RH; //重新加载重载值
TL0 = T0RL;
LedScan(); //数码管扫描显示
}main.c 文件的主要功能就是把获取到的红外遥控器的用户码和键码信息,传送到数码管上显示出来,并且通过定时器 T0 的 1 ms 中断进行数码管的动态刷新。不知道大家经过试验发现没有,当我们按下遥控器按键的时候,数码管显示的数字会闪烁,这是什么原因呢?单片机的程序都是顺序执行的,一旦我们按下遥控器按键,单片机就会进入遥控器解码的中断程序内,而这个程序执行的时间又比较长,要几十个毫秒,而如果数码管动态刷新间隔超过 10 ms 后就会感觉到闪烁,因此这个闪烁是由于程序执行红外解码时,延误了数码管动态刷新造成的。
如何解决?前边我们讲过中断优先级问题,如果设置了中断的抢占优先级,就会产生中断嵌套。中断嵌套的原理,我们在前边讲中断的时候已经讲过一次了,大家可以回头再复习一下。那么这个程序中,有2个中断程序,一个是外部中断程序负责接收红外数据,一个是定时器中断程序负责数码管扫描,要使红外接收不耽误数码管扫描的执行,那么就必须让定时器中断对外部中断实现嵌套,即把定时器中断设置为高抢占优先级。定时器中断程序,执行时间只有几十个 us,即使打断了红外接收中断的执行,也最多是给每个位的时间测量附加了几十 us 的误差,而这个误差在最短 560 us 的时间判断中完全是容许的,所以中断嵌套并不会影响红外数据的正常接收。在 main 函数中,大家把这行程序“//PT0 = 1;”的注释取消,也就是使这行代码生效,这样就设置了 T0 中断的高抢占优先级,再编译一下,下载到单片机里,然后按键试试,是不是没有任何闪烁了呢?而中断嵌套的意义也有所体会了吧。
