

11.4 单片机 IO 口模拟 UART 串口通信
为了让大家充分理解 UART 串口通信的原理,我们先把 P3.0 和 P3.1 当做 IO 口来进行模拟实际串口通信的过程,原理搞懂后,我们再使用寄存器配置实现串口通信过程。
对于 UART 串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200等速率。IO 口模拟 UART 串行通信程序是一个简单的演示程序,我们使用串口调试助手下发一个数据,数据加1后,再自动返回。
串口调试助手,这里我们直接使用 STC-ISP 软件自带的串口调试助手,先把串口调试助手的使用给大家说一下,如图11-6所示。第一步要选择串口助手菜单,第二步选择十六进制显示,第三步选择十六进制发送,第四步选择 COM 口,这个 COM 口要和自己电脑设备管理器里的那个 COM 口一致,波特率按我们程序设定好的选择,我们程序中让一个数据位持续时间是1/9600秒,那这个地方选择波特率就是选9600,校验位选 N,数据位8,停止位1。
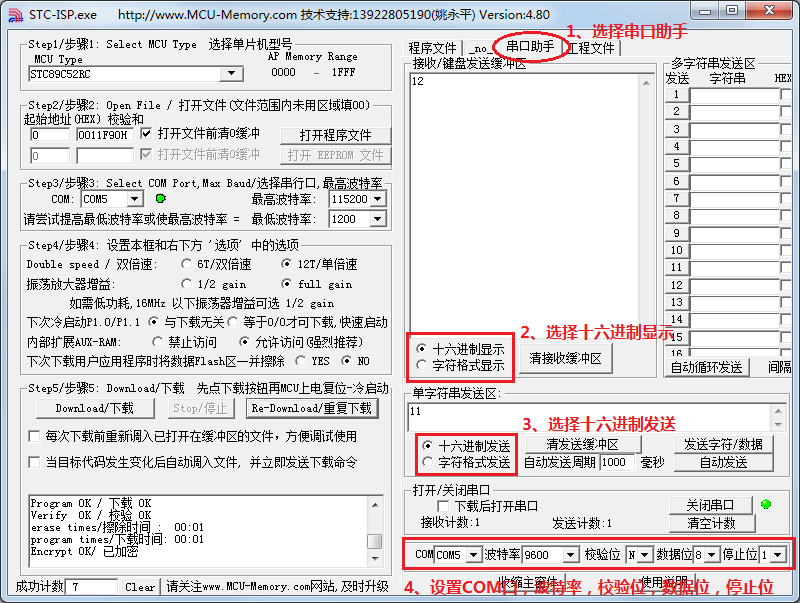
图11-6 串口调试助手示意图
串口调试助手的实质就是利用电脑上的 UART 通信接口,发送数据给我们的单片机,也可以把我们的单片机发送的数据接收到这个调试助手界面上。
因为初次接触通信方面的技术,所以我把后面的 IO 模拟串口通信程序进行一下解释,大家可以边看我的解释边看程序,把底层原理先彻底弄懂。
变量定义部分就不用说了,直接看 main 主函数。首先是对通信的波特率的设定,在这里我们配置的波特率是9600,那么串口调试助手也得是9600。配置波特率的时候,我们用的是定时器 T0 的模式2。模式2中,不再是 TH0 代表高8位,TL0 代表低8位了,而只有 TL0 在进行计数,当 TL0 溢出后,不仅仅会让 TF0 变1,而且还会将 TH0 中的内容重新自动装到 TL0 中。这样有一个好处,就是我们可以把想要的定时器初值提前存在 TH0 中,当 TL0 溢出后,TH0 自动把初值就重新送入 TL0 了,全自动的,不需要程序中再给 TL0 重新赋值了,配置方式很简单,大家可以自己看下程序并且计算一下初值。
波特率设置好以后,打开中断,然后等待接收串口调试助手下发的数据。接收数据的时候,首先要进行低电平检测 while (PIN_RXD),若没有低电平则说明没有数据,一旦检测到低电平,就进入启动接收函数 StartRXD()。接收函数最开始启动半个波特率周期,初学可能这里不是很明白。大家回头看一下我们的图11-2里边的串口数据示意图,如果在数据位电平变化的时候去读取,因为时序上的误差以及信号稳定性的问题很容易读错数据,所以我们希望在信号最稳定的时候去读数据。除了信号变化的那个沿的位置外,其它位置都很稳定,那么我们现在就约定在信号中间位置去读取电平状态,这样能够保证我们读的一定是正确的。
一旦读到了起始信号,我们就把当前状态设定成接收状态,并且打开定时器中断,第一次是半个周期进入中断后,对起始位进行二次判断一下,确认一下起始位是低电平,而不是一个干扰信号。以后每经过1/9600秒进入一次中断,并且把这个引脚的状态读到 RxdBuf 里边。等待接收完毕之后,我们再把这个 RxdBuf 加1,再通过 TXD 引脚发送出去,同样需要先发一位起始位,然后发8个数据位,再发结束位,发送完毕后,程序运行到 while (PIN_RXD),等待第二轮信号接收的开始。
#include <reg52.h>
sbit PIN_RXD = P3^0; //接收引脚定义
sbit PIN_TXD = P3^1; //发送引脚定义
bit RxdOrTxd = 0; //指示当前状态为接收还是发送
bit RxdEnd = 0; //接收结束标志
bit TxdEnd = 0; //发送结束标志
unsigned char RxdBuf = 0; //接收缓冲器
unsigned char TxdBuf = 0; //发送缓冲器
void ConfigUART(unsigned int baud);
void StartTXD(unsigned char dat);
void StartRXD();
void main(){
EA = 1; //开总中断
ConfigUART(9600);
while (1){ //配置波特率为9600
while (PIN_RXD); //等待接收引脚出现低电平,即起始位
StartRXD(); //启动接收
while (!RxdEnd); //等待接收完成
StartTXD(RxdBuf+1); //接收到的数据+1后,发送回去
while (!TxdEnd); //等待发送完成
}
}
/* 串口配置函数,baud-通信波特率 */
void ConfigUART(unsigned int baud){
TMOD &= 0xF0; //清零 T0 的控制位
TMOD |= 0x02; //配置 T0 为模式2
TH0 = 256 - (11059200/12)/baud; //计算 T0 重载值
}
/* 启动串行接收 */
void StartRXD(){
TL0 = 256 - ((256-TH0)>>1); //接收启动时的 T0 定时为半个波特率周期
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
RxdEnd = 0; //清零接收结束标志
RxdOrTxd = 0; //设置当前状态为接收
}
/* 启动串行发送,dat-待发送字节数据 */
void StartTXD(unsigned char dat){
TxdBuf = dat; //待发送数据保存到发送缓冲器
TL0 = TH0; //T0 计数初值为重载值
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
PIN_TXD = 0; //发送起始位
TxdEnd = 0; //清零发送结束标志
RxdOrTxd = 1; //设置当前状态为发送
}
/* T0 中断服务函数,处理串行发送和接收 */
void InterruptTimer0() interrupt 1{
static unsigned char cnt = 0; //位接收或发送计数
if (RxdOrTxd){ //串行发送处理
cnt++;
if (cnt <= 8){ //低位在先依次发送 8bit 数据位
PIN_TXD = TxdBuf & 0x01;
TxdBuf >>= 1;
}else if (cnt == 9){ //发送停止位
PIN_TXD = 1;
}else{ //发送结束
cnt = 0; //复位 bit 计数器
TR0 = 0; //关闭 T0
TxdEnd = 1; //置发送结束标志
}
}else{ //串行接收处理
if (cnt == 0){ //处理起始位
if (!PIN_RXD){ //起始位为0时,清零接收缓冲器,准备接收数据位
RxdBuf = 0;
cnt++;
}
}else{ //起始位不为0时,中止接收
TR0 = 0; //关闭 T0
}else if (cnt <= 8){ //处理8位数据位
RxdBuf >>= 1; //低位在先,所以将之前接收的位向右移
//接收脚为1时,缓冲器最高位置1,
//而为0时不处理即仍保持移位后的0
if (PIN_RXD){
RxdBuf |= 0x80;
}
cnt++;
}else{ //停止位处理
cnt = 0; //复位 bit 计数器
TR0 = 0; //关闭 T0
if (PIN_RXD){ //停止位为1时,方能认为数据有效
RxdEnd = 1; //置接收结束标志
}
}
}
}