

9.9 单片机蜂鸣器控制程序和驱动电路
蜂鸣器从结构区分分为压电式蜂鸣器和电磁式蜂鸣器。压电式为压电陶瓷片发音,电流比较小一些,电磁式蜂鸣器为线圈通电震动发音,体积比较小。
按照驱动方式分为有源蜂鸣器和无源蜂鸣器。这里的有源和无源不是指电源,而是振荡源。有源蜂鸣器内部带了振荡源,如图9-8所示中,给了 BUZZ 引脚一个低电平,蜂鸣器就会直接响。而无源蜂鸣器内部是不带振荡源的,要让他响必须给 500 Hz~4.5 KHz 之间的脉冲频率信号来驱动它才会响。有源蜂鸣器往往比无源蜂鸣器贵一些,因为里边多了振荡电路,驱动发音也简单,靠电平就可以驱动,而无源蜂鸣器价格比较便宜,此外无源蜂鸣器声音频率可以控制,而音阶与频率又有确定的对应关系,因此就可以做出来“do re mi fa sol la si”的效果,可以用它制作出简单的音乐曲目,比如生日歌、两只老虎等等。
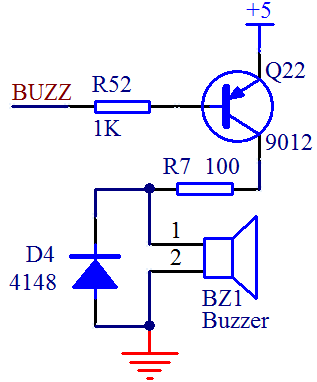
图 9-8 蜂鸣器电路原理图
我们来看一下图9-8的电路,蜂鸣器电流依然相对较大,因此需要用三极管驱动,并且加了一个100欧的电阻作为限流电阻。此外还加了一个 D4 二极管,这个二极管叫做续流二极管。我们的蜂鸣器是感性器件,当三极管导通给蜂鸣器供电时,就会有导通电流流过蜂鸣器。而我们知道,电感的一个特点就是电流不能突变,导通时电流是逐渐加大的,这点没有问题,但当关断时,经“电源-三极管-蜂鸣器-地”这条回路就截断了,过不了任何电流了,那么储存的电流往哪儿去呢,就是经过这个 D4 和蜂鸣器自身的环路来消耗掉了,从而就避免了关断时由于电感电流造成的反向冲击。接续关断时的电流,这就是续流二极管名称的由来。
蜂鸣器经常用于电脑、打印机、万用表这些设备上做提示音,提示音一般也很简单,就是简单发出个声音就行,我们用程序简单做了个 4 KHZ 频率下的发声和 1 KHZ 频率下的发声程序,同学们可以自己研究下程序,比较下实际效果。
#include <reg52.h>
sbit BUZZ = P1^6; //蜂鸣器控制引脚
unsigned char T0RH = 0; //T0 重载值的高字节
unsigned char T0RL = 0; //T0 重载值的低字节
void OpenBuzz(unsigned int frequ);
void StopBuzz();
void main(){
unsigned int i;
TMOD = 0x01; //配置 T0 工作在模式1,但先不启动
EA = 1;
while (1){ //使能全局中断
OpenBuzz(4000); //以 4 KHz 的频率启动蜂鸣器
for (i=0; i<40000; i++);
StopBuzz(); //停止蜂鸣器
for (i=0; i<40000; i++);
OpenBuzz(1000); //以 1 KHz 的频率启动蜂鸣器
for (i=0; i<40000; i++);
StopBuzz(); //停止蜂鸣器
for (i=0; i<40000; i++);
}
}
/* 蜂鸣器启动函数,frequ-工作频率 */
void OpenBuzz(unsigned int frequ){
unsigned int reload;//计算所需的定时器重载值
reload = 65536 - (11059200/12)/(frequ*2); //由给定频率计算定时器重载值
T0RH = (unsigned char)(reload >> 8); //16 位重载值分解为高低两个字节
T0RL = (unsigned char)reload;
TH0 = 0xFF; //设定一个接近溢出的初值,以使定时器马上投入工作
TL0 = 0xFE;
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
}
/* 蜂鸣器停止函数 */
void StopBuzz(){
ET0 = 0; //禁用 T0 中断
TR0 = 0; //停止 T0
}
/* T0 中断服务函数,用于控制蜂鸣器发声 */
void InterruptTimer0() interrupt 1{
TH0 = T0RH; //重新加载重载值
TL0 = T0RL;
BUZZ = ~BUZZ; //反转蜂鸣器控制电平
}另外用蜂鸣器来输出音乐,仅仅是好玩而已,应用很少,里边包含了音阶、乐谱的相关内容,程序也有一点复杂,所以就不详细给大家去讲解了。仅提供一个可以播放《两只老虎》的程序,大家可以下载到板子上玩玩,满足一下好奇心。
#include <reg52.h>
sbit BUZZ = P1^6; //蜂鸣器控制引脚
unsigned int code NoteFrequ[] = { //中音1-7 和高音1-7 对应频率列表
523, 587, 659, 698, 784, 880, 988, //中音1-7
1047, 1175, 1319, 1397, 1568, 1760, 1976 //高音1-7
};
unsigned int code NoteReload[] = { //中音1-7 和高音1-7 对应的定时器重载值
65536 - (11059200/12) / (523*2), //中音1
65536 - (11059200/12) / (587*2), //2
65536 - (11059200/12) / (659*2), //3
65536 - (11059200/12) / (698*2), //4
65536 - (11059200/12) / (784*2), //5
65536 - (11059200/12) / (880*2), //6
65536 - (11059200/12) / (988*2), //7
65536 - (11059200/12) / (1047*2), //高音1
65536 - (11059200/12) / (1175*2), //2
65536 - (11059200/12) / (1319*2), //3
65536 - (11059200/12) / (1397*2), //4
65536 - (11059200/12) / (1568*2), //5
65536 - (11059200/12) / (1760*2), //6
65536 - (11059200/12) / (1976*2), //7
};
bit enable = 1; //蜂鸣器发声使能标志
bit tmrflag = 0; //定时器中断完成标志
unsigned char T0RH = 0xFF; //T0 重载值的高字节
unsigned char T0RL = 0x00; //T0 重载值的低字节
void PlayTwoTiger();
void main(){
unsigned int i;
EA = 1; //使能全局中断
TMOD = 0x01; //配置 T0 工作在模式1
TH0 = T0RH;
TL0 = T0RL;
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
while (1){
PlayTwoTiger(); //播放乐曲--两支老虎
for (i=0; i<40000; i++); //停止一段时间
}
}
/* 两支老虎乐曲播放函数 */
void PlayTwoTiger(){
unsigned char beat; //当前节拍索引
unsigned char note; //当前节拍对应的音符
unsigned int time = 0; //当前节拍计时
unsigned int beatTime = 0; //当前节拍总时间
unsigned int soundTime = 0; //当前节拍需发声时间
//两只老虎音符表
unsigned char code TwoTigerNote[] = {
1, 2, 3, 1, 1, 2, 3, 1, 3, 4, 5, 3, 4, 5,
5,6, 5,4, 3, 1, 5,6, 5,4, 3, 1, 1, 5, 1, 1, 5, 1,
};
//两只老虎节拍表,4 表示一拍,1 就是 1/4 拍,8 就是 2 拍
unsigned char code TwoTigerBeat[] = {
4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 8, 4, 4, 8,
3,1, 3,1, 4, 4, 3,1, 3,1, 4, 4, 4, 4, 8, 4, 4, 8,
};
//用节拍索引作为循环变量
for (beat=0; beat<sizeof(TwoTigerNote); ){
while (!tmrflag); //每次定时器中断完成后,检测并处理节拍
tmrflag = 0;
if (time == 0){ //当前节拍播完则启动一个新节拍
note = TwoTigerNote[beat] - 1;
T0RH = NoteReload[note] >> 8;
T0RL = NoteReload[note];
//计算节拍总时间,右移2位相当于除4,移位代替除法可以加快执行速度
beatTime = (TwoTigerBeat[beat] * NoteFrequ[note]) >> 2;
//计算发声时间,为总时间的 0.75,移位原理同上
soundTime = beatTime - (beatTime >> 2);
enable = 1; //指示蜂鸣器开始发声
time++;
}else{ //当前节拍未播完则处理当前节拍
//当前持续时间到达节拍总时间时归零,
//并递增节拍索引,以准备启动新节拍
if (time >= beatTime){
time = 0;
beat++;
}else{ //当前持续时间未达到总时间时,
time++; //累加时间计数
//到达发声时间后,指示关闭蜂鸣器,
//插入 0.25*总时间的静音间隔,
if (time == soundTime){
enable = 0; //用以区分连续的两个节拍
}
}
}
}
}
/* T0 中断服务函数,用于控制蜂鸣器发声 */
void InterruptTimer0() interrupt 1{
TH0 = T0RH; //重新加载重载值
TL0 = T0RL;
tmrflag = 1;
if (enable){ //使能时反转蜂鸣器控制电平
BUZZ = ~BUZZ;
}else{ //未使能时关闭蜂鸣器
BUZZ = 1;
}
}