

8.1 单片机最小系统解析(电源、晶振和复位电路)
电源
我们在学习过程中,很多指标都是直接用的概念指标,比如我们说 +5 V 代表1,GND 代表0等等。但在实际电路中的电压值并不是完全精准的,那这些指标允许范围是什么呢?随着我们所学的内容不断增多,大家要慢慢培养一种阅读数据手册的能力。
比如,我们要使用 STC89C52RC 单片机的时候,找到它的数据手册第11页,看第二项——工作电压:5.5 V~3.4 V(5 V 单片机),这个地方就说明这个单片机正常的工作电压是个范围值,只要电源 VCC 在 5.5 V~3.4 V 之间都可以正常工作,电压超过 5.5 V 是绝对不允许的,会烧坏单片机,电压如果低于 3.4 V,单片机不会损坏,但是也不能正常工作。而在这个范围内,最典型、最常用的电压值就是 5V,这就是后面括号里“5 V 单片机”这个名称的由来。除此之外,还有一种常用的工作电压范围是 2.7 V~3.6 V、典型值是 3.3 V 的单片机,也就是所谓的“3.3 V 单片机”。日后随着大家接触更多的器件,对这点会有更深刻的理解。
现在我们再顺便多了解一点,大家打开 74HC138 的数据手册,会发现 74HC138 手册的第二页也有一个表格,上边写了 74HC138 的工作电压范围,最小值是 4.75 V,额定值是 5 V,最大值是 5.25 V,可以得知它的工作电压范围是 4.75 V~5.25 V。这个地方讲这些目的是让大家清楚的了解,我们获取器件工作参数的一个最重要、也是最权威的途径,就是查阅该器件的数据手册。
晶振
晶振通常分为无源晶振和有源晶振两种类型,无源晶振一般称之为 crystal(晶体),而有源晶振则叫做 oscillator(振荡器)。
有源晶振是一个完整的谐振振荡器,它是利用石英晶体的压电效应来起振,所以有源晶振需要供电,当我们把有源晶振电路做好后,不需要外接其它器件,只要给它供电,它就可以主动产生振荡频率,并且可以提供高精度的频率基准,信号质量也比无源信号要好。
无源晶振自身无法振荡起来,它需要芯片内部的振荡电路一起工作才能振荡,它允许不同的电压,但是信号质量和精度较有源晶振差一些。相对价格来说,无源晶振要比有源晶振价格便宜很多。无源晶振两侧通常都会有个电容,一般其容值都选在 10 pF~40 pF 之间,如果手册中有具体电容大小的要求则要根据要求来选电容,如果手册没有要求,我们用 20 pF 就是比较好的选择,这是一个长久以来的经验值,具有极其普遍的适用性。
我们来认识下比较常用的两种晶振的样貌,如图8-1和图8-2所示。
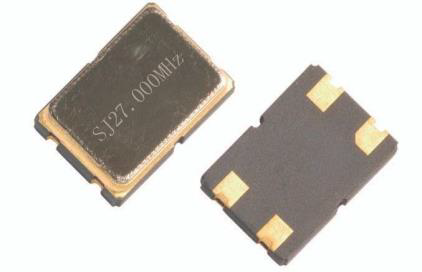
图8-1 有源晶振实物图

图8-2 无源晶振实物图
有源晶振通常有4个引脚,VCC,GND,晶振输出引脚和一个没有用到的悬空引脚(有些晶振也把该引脚作为使能引脚)。无源晶振有2个或3个引脚,如果是3个引脚的话,中间引脚接是晶振的外壳,使用时要接到 GND,两侧的引脚就是晶体的2个引出脚了,这两个引脚作用是等同的,就像是电阻的2个引脚一样,没有正负之分。对于无源晶振,用我们的单片机上的两个晶振引脚接上去即可,而有源晶振,只接到单片机的晶振的输入引脚上,输出引脚上不需要接,如图8-3和图8-4所示。
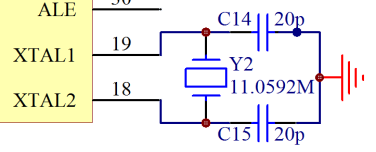
图8-3 无源晶振接法
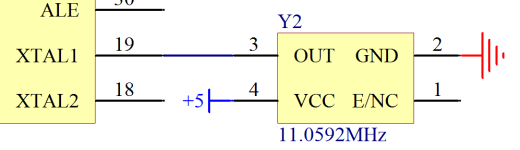
图8-4 有源晶振接法
复位电路
我们先来分析一下 KST-51 开发板上的复位电路,如图8-5所示。
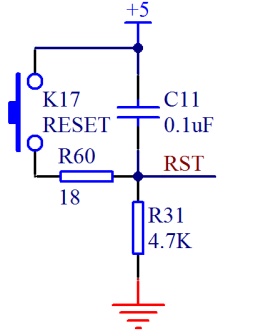
图8-5 单片机复位电路
当这个电路处于稳态时,电容起到隔离直流的作用,隔离了 +5 V,而左侧的复位按键是弹起状态,下边部分电路就没有电压差的产生,所以按键和电容 C11 以下部分的电位都是和 GND 相等的,也就是 0 V。我们这个单片机是高电平复位,低电平正常工作,所以正常工作的电压是 0 V,没有问题。
我们再来分析从没有电到上电的瞬间,电容 C11 上方电压是 5 V,下方是 0 V,根据我们初中所学的知识,电容 C11 要进行充电,正离子从上往下充电,负电子从 GND 往上充电,这个时候电容对电路来说相当于一根导线,全部电压都加在了 R31 这个电阻上,那么 RST端口位置的电压就是 5 V,随着电容充电越来越多,即将充满的时候,电流会越来越小,那 RST 端口上的电压值等于电流乘以 R31 的阻值,也就会越来越小,一直到电容完全充满后,线路上不再有电流,这个时候 RST 和 GND 的电位就相等了也就是 0 V 了。
从这个过程上来看,我们加上这个电路,单片机系统上电后,RST 引脚会先保持一小段时间的高电平而后变成低电平,这个过程就是上电复位的过程。那这个“一小段时间”到底是多少才合适呢?每种单片机不完全一样,51单片机手册里写的是持续时间不少于2个机器周期的时间。复位电压值,每种单片机不完全一样,我们按照通常值 0.7 VCC 作为复位电压值,复位时间的计算过程比较复杂,我这里只给大家一个结论,时间 t=1.2 RC,我们用的 R 是4700欧,C 是0.0000001法,那么计算出 t 就是 0.000564秒,即 564 us,远远大于2个机器周期(2 us),在电路设计的时候一般留够余量就行。
按键复位(即手动复位)有2个过程,按下按键之前,RST 的电压是 0 V,当按下按键后电路导通,同时电容也会在瞬间进行放电,RST 电压值变化为 4700 VCC/(4700+18),会处于高电平复位状态。当松开按键后就和上电复位类似了,先是电容充电,后电流逐渐减小直到 RST 电压变 0 V 的过程。我们按下按键的时间通常都会有几百毫秒,这个时间足够复位了。
按下按键的瞬间,电容两端的 5 V 电压(注意不是电源的 5 V 和 GND 之间)会被直接接通,此刻会有一个瞬间的大电流冲击,会在局部范围内产生电磁干扰,为了抑制这个大电流所引起的干扰,我们这里在电容放电回路中串入一个18欧的电阻来限流。
如果有的同学已经想开始 DIY 设计自己的电路板,那单片机最小系统的设计现在已经有了足够的理论依据了,可以考虑尝试了。基础比较薄弱的同学先不要着急,继续跟着往下学,把课程都学完了再动手操作也不迟,磨刀不误砍柴工。
