

4.2 C 语言变量类型和范围
什么是变量?变量自然和常量是相对的。常量就是1、2、3、4.5、10.6......等固定的数字,而变量则根我们小学学的 x 是一个概念,我们可以让它是1,也可以让它2,我们想让它是几是我们的程序说了算的。
那么我们小学学的数学里边,有这么几类,正数、负数、整数和小数。在 C 语言里,除名字和我们数学里学的不一样外,还对数据大小进行了限制。这个地方有一点复杂的是,在 C51 里边的数据范围和其他编程环境还可能不完全一样,因此我们下边的这个图,仅仅代表的是 C51,其他编程环境可能不一样,大家知道有这回事就可以了。
C 语言的数据基本类型分为字符型、整型、长整型以及浮点型,如图4-1所示。
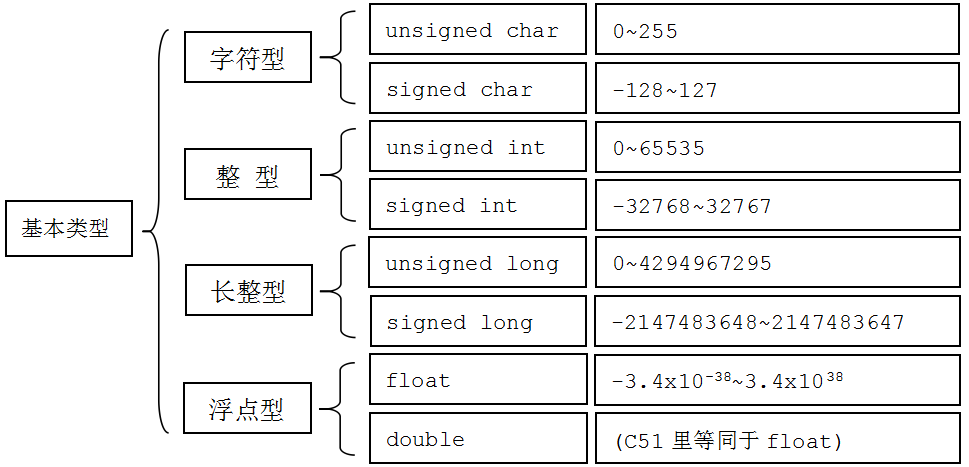
图4-1 C 语言基本数据类型
图4-1中,四种基本类型,每个基本类型又包含了两个类型。字符型、整型、长整型,除了可表达的数值大小范围不同之外,都是只能表达整数,而 unsigned 型的又只能表达正整数,要表达负整数则必须用 signed 型,如要表达小数的话,则必须用浮点型了。
比如上节课最后的闪烁 LED 小灯的程序,我们用的是 unsigned int i = 0;这个地方 i 的取值范围就是0~65535,在接下来的 for 语句里,如果我们把原来那个30000改成70000的话,for(i=0;i<70000;i++);大家会发现小灯会一直亮,而不是闪烁了,这里自然就有因超出 i 取值范围所造成的问题,但要彻底搞明白这个问题,我们还要来了解 for 语句的用法。不用急,接下来我们很快就会学到它了。
这里有一个编程宗旨,就是能用小不用大。就是说定义能用1个字节 char 解决问题的,就不定义成 int,一方面节省 RAM 空间可以让其他变量或者中间运算过程使用,另外一方面,占空间小程序运算速度也快一些。
