

14.6 单片机EEPROM的页写入
在向 EEPROM 连续写入多个字节的数据时,如果每写一个字节都要等待几 ms 的话,整体上的写入效率就太低了。因此 EEPROM 的厂商就想了一个办法,把 EEPROM 分页管理。24C01、24C02 这两个型号是8个字节一个页,而 24C04、24C08、24C16 是16个字节一页。我们开发板上用的型号是 24C02,一共是256个字节,8个字节一页,那么就一共有32页。
分配好页之后,如果我们在同一个页内连续写入几个字节后,最后再发送停止位的时序。EEPROM 检测到这个停止位后,就会一次性把这一页的数据写到非易失区域,就不需要像上节课那样写一个字节检测一次了,并且页写入的时间也不会超过 5 ms。如果我们写入的数据跨页了,那么写完了一页之后,我们要发送一个停止位,然后等待并且检测 EEPROM 的空闲模式,一直等到把上一页数据完全写到非易失区域后,再进行下一页的写入,这样就可以在很大程度上提高数据的写入效率。 /*I2C.c 文件程序源代码***/ (此处省略,可参考之前章节的代码) /*Lcd1602.c 文件程序源代码***/ (此处省略,可参考之前章节的代码)
/****************************eeprom.c 文件程序源代码*****************************/
#include <reg52.h>
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadACK();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat);
/* E2 读取函数,buf-数据接收指针,addr-E2 中的起始地址,len-读取长度 */
void E2Read(unsigned char *buf, unsigned char addr, unsigned char len){
do { //用寻址操作查询当前是否可进行读写操作
I2CStart();
if (I2CWrite(0x50<<1)){ //应答则跳出循环,非应答则进行下一次查询
break;
}
I2CStop();
}while(1);
I2CWrite(addr); //写入起始地址
I2CStart();//发送重复启动信号
I2CWrite((0x50<<1)|0x01); //寻址器件,后续为读操作
while (len > 1){//连续读取 len-1 个字节
*buf++ = I2CReadACK(); //最后字节之前为读取操作+应答
len--;
}
*buf = I2CReadNAK(); //最后一个字节为读取操作+非应答
I2CStop();
}
/* E2 写入函数,buf-源数据指针,addr-E2 中的起始地址,len-写入长度 */
void E2Write(unsigned char *buf, unsigned char addr, unsigned char len){
while (len > 0){ //等待上次写入操作完成
do { //用寻址操作查询当前是否可进行读写操作
I2CStart();
if (I2CWrite(0x50<<1)){ //应答则跳出循环,非应答则进行下一次查询
break;
}
I2CStop();
} while(1);
//按页写模式连续写入字节
I2CWrite(addr); //写入起始地址
while (len > 0){
I2CWrite(*buf++); //写入一个字节数据
len--; //待写入长度计数递减
addr++; //E2 地址递增
//检查地址是否到达页边界,24C02 每页 8 字节,
//所以检测低 3 位是否为零即可
if ((addr&0x07) == 0){
break; //到达页边界时,跳出循环,结束本次写操作
}
}
I2CStop();
}
}遵循模块化的原则,我们把 EEPROM 的读写函数也单独写成一个 eeprom.c 文件。其中 E2Read 函数和上一节是一样的,因为读操作与分页无关。重点是 E2Write 函数,我们在写入数据的时候,要计算下一个要写的数据的地址是否是一个页的起始地址,如果是的话,则必须跳出循环,等待 EEPROM 把当前这一页写入到非易失区域后,再进行后续页的写入。
/*****************************main.c 文件程序源代码******************************/
#include <reg52.h>
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str);
extern void E2Read(unsigned char *buf, unsigned char addr, unsigned char len);
extern void E2Write(unsigned char *buf, unsigned char addr, unsigned char len);
void MemToStr(unsigned char *str, unsigned char *src, unsigned char len);
void main(){
unsigned char i;
unsigned char buf[5];
unsigned char str[20];
InitLcd1602(); //初始化液晶
E2Read(buf, 0x8E, sizeof(buf)); //从 E2 中读取一段数据
MemToStr(str, buf, sizeof(buf)); //转换为十六进制字符串
LcdShowStr(0, 0, str); //显示到液晶上
for (i=0; i<sizeof(buf); i++){ //数据依次+1,+2,+3...
buf[i] = buf[i] + 1 + i;
}
E2Write(buf, 0x8E, sizeof(buf)); //再写回到 E2 中
while(1);
}
/* 将一段内存数据转换为十六进制格式的字符串,
str-字符串指针,src-源数据地址,len-数据长度 */
void MemToStr(unsigned char *str, unsigned char *src, unsigned char len){
unsigned char tmp;
while (len--){
tmp = *src >> 4; //先取高 4 位
if (tmp <= 9){ //转换为 0-9 或 A-F
*str++ = tmp + '0';
}else{
*str++ = tmp - 10 + 'A';
}
tmp = *src & 0x0F; //再取低 4 位
if (tmp <= 9){ //转换为 0-9 或 A-F
*str++ = tmp + '0';
}else{
*str++ = tmp - 10 + 'A';
}
*str++ = ' '; //转换完一个字节添加一个空格
src++;
}
}多字节写入和页写入程序都编写出来了,而且页写入的程序我们还特地跨页写的数据,它们的写入时间到底差别多大呢。我们用一些工具可以测量一下,比如示波器,逻辑分析仪等工具。我现在把两次写入时间用逻辑分析仪给抓了出来,并且用时间标签 T1 和 T2 标注了开始位置和结束位置,如图14-5和图14-6所示,右侧显示的|T1-T2|就是最终写入5个字节所耗费的时间。多字节一个一个写入,每次写入后都需要再次通信检测 EEPROM 是否在“忙”,因此耗费了大量的时间,同样的写入5个字节的数据,一个一个写入用了 8.4 ms 左右的时间,而使用页写入,只用了 3.5 ms 左右的时间。
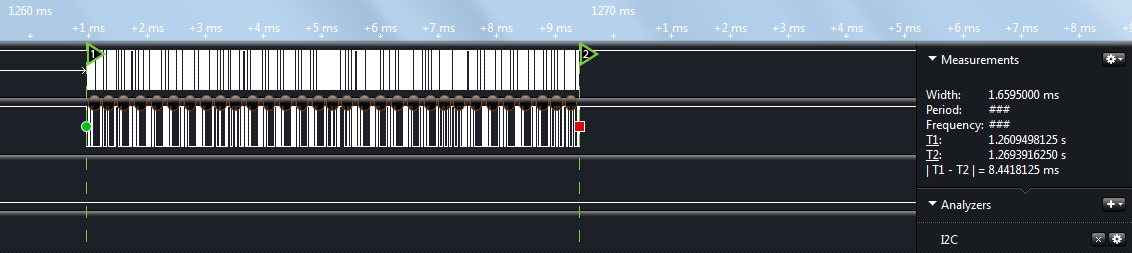
图14-5 多字节写入时间
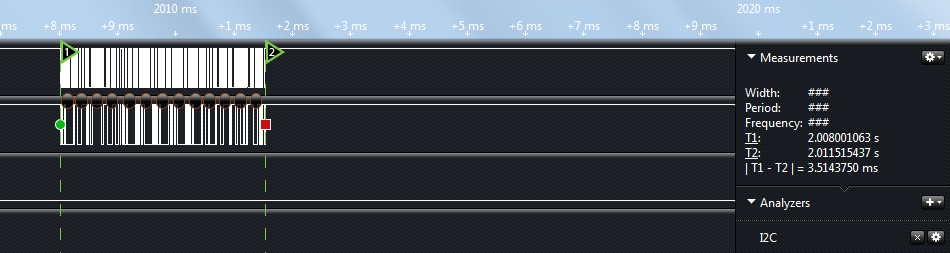
图14-6 跨页写入时间
