

12.7 1602 液晶的读写时序介绍
1602 液晶内部带了80个字节的显示 RAM,用来存储我们发送的数据,它的结构如图12-2所示。
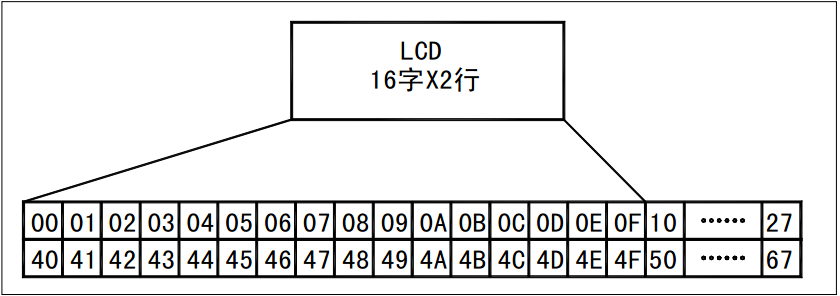
图12-2 1602 内部 RAM 结构
第一行的地址是 0x00H 到 0x27,第二行的地址从 0x40 到 0x67,其中第一行 0x00 到 0x0F 是与液晶上第一行16个字符显示位置相对应的,第二行 0x40 到 0x4F 是与第二行16个字符显示位置相对应的。而每行都多出来一部分,是为了显示移动字幕设置的。1602 字符液晶是显示字符的,因此它跟 ASCII 字符表是对应的。比如我们给 0x00 这个地址写一个„a‟,也就是十进制的97,液晶的最左上方的那个小块就会显示一个字母 a。此外,我们本章学过指针了,液晶内部有个数据指针,它指向哪里,我们写的那个数据就会送到相应的那个地址里。
液晶有一个状态字字节,我们通过读取这个状态字的内容,就可以知道 1602 液晶的一些内部情况,如表12-5所示。
表12-5 1602 液晶状态字
| bit0~bit6 | 当前数据的指针的值 | |
|---|---|---|
| bit7 | 读写操作使能 | 1:禁止 0:允许 |
这个状态字节有8个位,最高位表示了当前液晶是不是“忙”,如果这个位是1表示液晶正“忙”,禁止我们读写数据或者命令,如果是0,则可以进行读写。而低7位就表示了当前数据地址指针的位置。
1602 的基本操作时序,一共有4个,这些大家都不需要记住,但是都需要理解,因为我们现在不是为了应付考试,所以不需要你把手册背熟,但是你写程序的时候,打开手册要能看懂如何操作,还要再提醒一句,单片机读外部状态前,必须先保证自己是高电平哦。
我们这里要做 1602 液晶的程序,因此先把用到的总线接口做一个统一声明:
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;1、读状态:RS=L,R/W=H,E=H。这是个很简单的逻辑,就是说,我们直接写
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
LCD1602_E = 1;
sta = LCD1602_DB;这样就把当前液晶的状态字读到了 sta 这个变量中,我们可以通过判断 sta 最高位的值来了解当前液晶是否处于“忙”状态,也可以得知当前数据的指针位置。两个问题,一是如果我们当前读到的状态是“不忙”,那么我们程序可以进行读写操作,如果当前状态是“忙”,那么我们还得继续等待重新判断液晶的状态;问题二,大家可以看我们的原理图,流水灯、数码管、点阵、1602 液晶都用到了 P0 口总线,我们读完了液晶状态继续保持 LCD1602_E 是高电平的话,1602 液晶会继续输出它的状态值,输出的这个值会占据了 P0 总线,干扰到流水灯数码管等其它外设,所以我们读完了状态,通常要把这个引脚拉低来释放总线,这里我们用了一个 do...while 循环语句来实现。
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do {
LCD1602_E = 1;
sta = LCD1602_DB; //读取状态字
LCD1602_E = 0; //读完撤销使能,防止液晶输出数据干扰 P0 总线
} while (sta & 0x80);
//bit7 等于1表示液晶正忙,重复检测直到其等于0为止2、读数据:RS=H,R/W=L,E=H。这个逻辑也很简单,但是读数据不常用,大家了解一下就可以了,这里就不详细解释了。
3、写指令:RS=L,R/W=L,D0~D7=指令码,E=高脉冲。
这个在逻辑上没什么难的,只是 E=高脉冲这个问题要解释一下。这个指令一共有4条语句,其中前三条语句顺序无所谓,但是 E=高脉冲这一句很关键。实际上流程是这样的:因为我们现在是写数据,所以我们首先要保证我们的 E 引脚是低电平状态,而前三句不管我们怎么写,1602 液晶只要没有接收到 E 引脚的使能控制,它都不会来读总线上的信号的。当通过前三句准备好数据之后,E 使能引脚从低电平到高电平变化,然后 E 使能引脚再从高电平到低电平出现一个下降沿,1602 液晶内部一旦检测到这个下降沿后,并且检测到 RS=L,R/W=L,就马上来读取 D0~D7 的数据,完成单片机写 1602 指令过程。归纳总结我们写了个 E=高脉冲,意思就是:E 使能引脚先从低拉高,再从高拉低,形成一个高脉冲。
4、写数据:RS=H,R/W=L,D0~D7=数据,E=高脉冲。
写数据和写指令是类似的,就是把 RS 改成 H,把总线改成数据即可。
此外要顺便提一句,这里用的 1602 液晶所使用的接口时序是摩托罗拉公司所创立的 6800 时序,还有另外一种时序是 Intel 公司的 8080 时序,也有部分液晶模块采用,只是相对来说比较少见,大家知道这么回事即可。
这里还要说明一个问题,就是从这4个时序大家可以看出来,1602 液晶的使能引脚 E,高电平的时候是有效,低电平的时候是无效,前面也提到了高电平时会影响 P0 口,因此正常情况下,如果我们没有使用液晶的话,那么程序开始写一句 LCD1602_E=0,就可以避免 1602 干扰到其它外设。我们之前的程序没有加这句,是因为我们板子在这个引脚上加了一个 15 K 的下拉电阻,这个下拉电阻就可以保证这个引脚上电后默认是低电平,如图12-3所示。
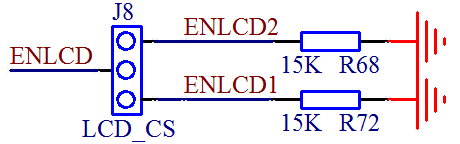
图12-3 液晶使能引脚的下拉电阻
如果不加这个下拉电阻,刚开始讲点亮 LED 小灯的时候,我们就得写一句:LCD1602_E=0,可能很多初学者容易弄不明白,所以我们才加了这样一个电路。但是在实际开发过程中,就不必要这样了。如果这是个实际产品,能用软件去处理的,我们就不会用硬件去实现,所以大家在做实际产品的时候,这块电路可以直接去掉,只需要在程序开头多加一条语句即可。
