

14.1 单片机 I2C 时序介绍
在硬件上,I2C 总线是由时钟总线 SCL 和数据总线 SDA 两条线构成,连接到总线上的所有器件的 SCL 都连到一起,所有 SDA 都连到一起。I2C 总线是开漏引脚并联的结构,因此我们外部要添加上拉电阻。对于开漏电路外部加上拉电阻,就组成了线“与”的关系。总线上线“与”的关系就是说,所有接入的器件保持高电平,这条线才是高电平,而任何一个器件输出一个低电平,那这条线就会保持低电平,因此可以做到任何一个器件都可以拉低电平,也就是任何一个器件都可以作为主机,如图14-1所示,我们添加了 R63 和 R64 两个上拉电阻。
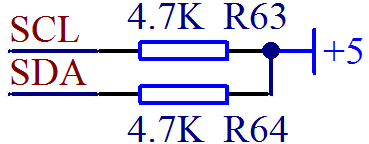
图14-1 I2C 总线的上拉电阻
虽然说任何一个设备都可以作为主机,但绝大多数情况下我们都是用单片机来做主机,而总线上挂的多个器件,每一个都像电话机一样有自己唯一的地址,在信息传输的过程中,通过这唯一的地址就可以正常识别到属于自己的信息,在 KST-51 开发板上,就挂接了2个 I2C 设备,一个是 24C02,一个是 PCF8591。
我们在学习 UART 串行通信的时候,知道了通信流程分为起始位、数据位、停止位这三部分,同理在 I2C 中也有起始信号、数据传输和停止信号,如图14-2所示。

图14-2 I2C 时序流程图
从图上可以看出来,I2C 和 UART 时序流程有相似性,也有一定的区别。UART 每个字节中,都有一个起始位、8个数据位、1位停止位。而 I2C 分为起始信号、数据传输部分、停止信号。其中数据传输部分,可以一次通信过程传输很多个字节,字节数是不受限制的,而每个字节的数据最后也跟了一位,这一位叫做应答位,通常用 ACK 表示,有点类似于 UART 的停止位。
下面我们一部分一部分的把 I2C 通信时序进行剖析。之前我们已经学过了 UART,所以学习 I2C 的过程我尽量拿 UART 来作为对比,这样有助于更好的理解。但是有一点大家要理解清楚,就是 UART 通信虽然用了 TXD 和 RXD 两根线,但是实际一次通信中,1条线就可以完成,2条线是把发送和接收分开而已,而 I2C 每次通信,不管是发送还是接收,必须2条线都参与工作才能完成,为了更方便的看出来每一位的传输流程,我们把图14-2改进成图14-3。

图14-3 I2C 通信流程解析
起始信号:UART 通信是从一直持续的高电平出现一个低电平标志起始位;而 I2C 通信的起始信号的定义是 SCL 为高电平期间,SDA 由高电平向低电平变化产生一个下降沿,表示起始信号,如图14-3中的 Start 部分所示。
数据传输:首先,UART 是低位在前,高位在后;而 I2C 通信是高位在前,低位在后。其次,UART 通信数据位是固定长度,波特率分之一,一位一位固定时间发送完毕就可以了。而 I2C 没有固定波特率,但是有时序的要求,要求当 SCL 在低电平的时候,SDA 允许变化,也就是说,发送方必须先保持 SCL 是低电平,才可以改变数据线 SDA,输出要发送的当前数据的一位;而当 SCL 在高电平的时候,SDA 绝对不可以变化,因为这个时候,接收方要来读取当前 SDA 的电平信号是0还是1,因此要保证 SDA 的稳定,如图14-3中的每一位数据的变化,都是在 SCL 的低电平位置。8位数据位后边跟着的是一位应答位,应答位我们后边还要具体介绍。
停止信号:UART 通信的停止位是一位固定的高电平信号;而 I2C 通信停止信号的定义是 SCL 为高电平期间,SDA 由低电平向高电平变化产生一个上升沿,表示结束信号,如图14-3中的 Stop 部分所示。
